eTASQ Motion a été conçu pour être une solution fiable, industrielle et adaptable à une multitude de produits.
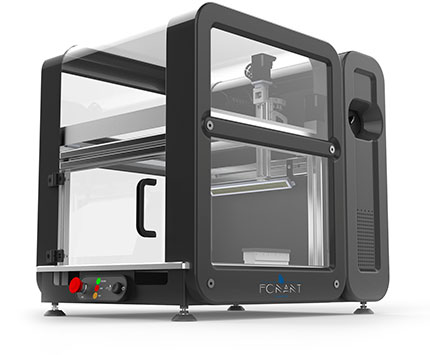
La personnalisation du robot
Le robot est générique et modulaire. Il est possible de personnaliser la partie logicielle et la partie mécanique.
eTASQ Motion est capable de tester toutes les IHM (interfaces homme-machine).
Différents posages sont disponibles afin de s’adapter à votre produit.
Ces posages permettent un placement optimal, facilement répétable et rapide du produit dans l’enceinte de test du robot. Une fois le posage installé, le changement de produit se fait simplement et rapidement.
Les domaines d’application sont nombreux et variés. eTASQ Motion s’adapte à votre métier (différents modules et mots clés disponibles), à votre produit et à votre environnement de test existant.
Vous pouvez configurer simplement votre produit (définition des labels, des positions fixes, des zones de lecture…). Le script de test se rédige en Instructions en Langage Naturel (ILNs métiers). Cela permet aux opérateurs non informaticiens d’écrire facilement le test à jouer.
L’objectif est de tester le produit dans son environnement de test, dans des conditions les plus proches du réel.
Pourquoi personnaliser ?
En tant que bureau d’études nous avons la capacité de personnaliser notre offre pour s’adapter aux besoins spécifiques de chaque client, de chaque projet.
La personnalisation vous permet de recevoir un robot clé en main, déjà fonctionnel pour vos produits. L’objectif est d’être au plus proche des tests aujourd’hui réalisés à la main.
Au-delà de la rédaction des scripts de test avec des mots clés métier, nous avons la capacité d’ajouter des «sens» supplémentaires au robot (logiciel ou matériel) pour se rapprocher des spécificités de votre activité.
Notre objectif, automatiser vos procédures métiers.
La personnalisation logicielle
La personnalisation logicielle consiste à concevoir une interface répondant à des besoins spécifiques, il s’agit d’un développement logiciel réalisé sur mesure pour le client.
Voici des exemples de personnalisation logicielle que nos équipes ont déjà réalisé :
- Protocole de communication propriétaire : Port série, Modbus TCP, ASCII, UTF-8
- Interface avec des gestionnaires ou bancs de tests existants
- Interface avec un instrument de simulation ou de mesure

- Les grandes marques d’instruments

Nous nous adressons à tous les équipements utilisant la norme SCPI (Standard Commands for Programmable Instruments).
- Développement d’une bibliothèque sur mesure (lecture d’afficheurs 7-16 segments)

- Parsing de fichier de configuration (Excel, csv) -> ex : multi-langues, valeurs de référence (code pin)

- Module de téléchargement / mise à jour de votre produit / debug
=> Utilisation dans le cadre de l’intégration continue (CI)
=> Interface avec le port JTAG ou l’interface debug de votre équipement
- Personnalisation des trois «sens» d’eTASQ Motion (le toucher, la vue, l’ouïe) :
=> Traitement d’image dédié (ex : écran déformé pour un ticket de TPE)
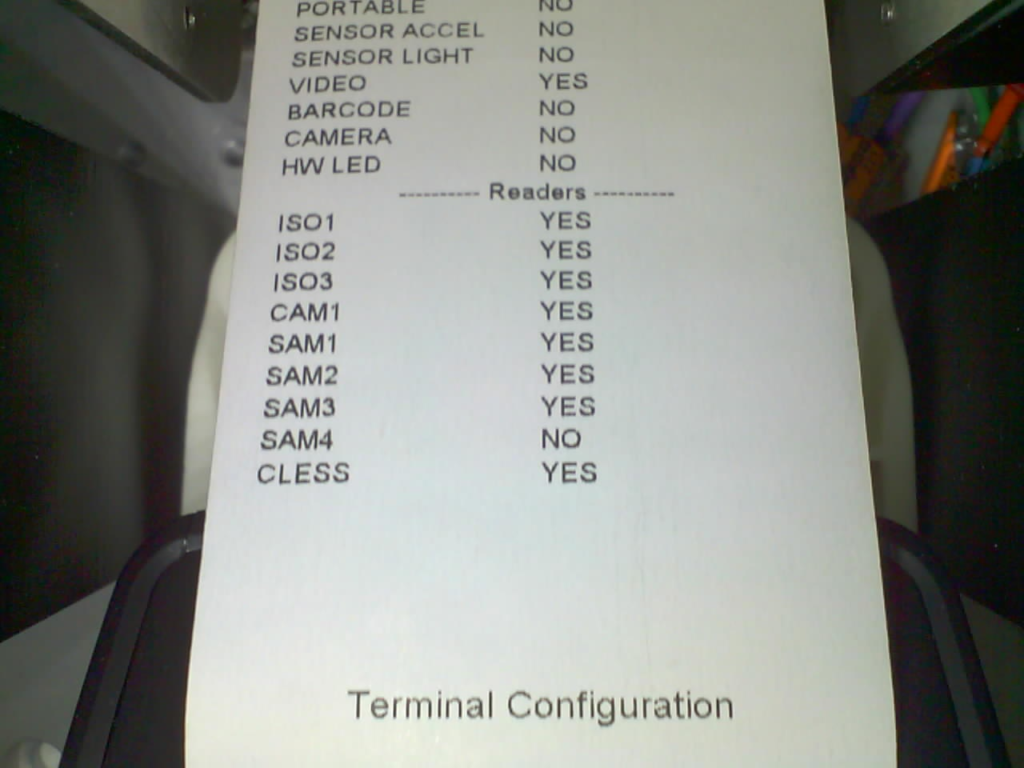
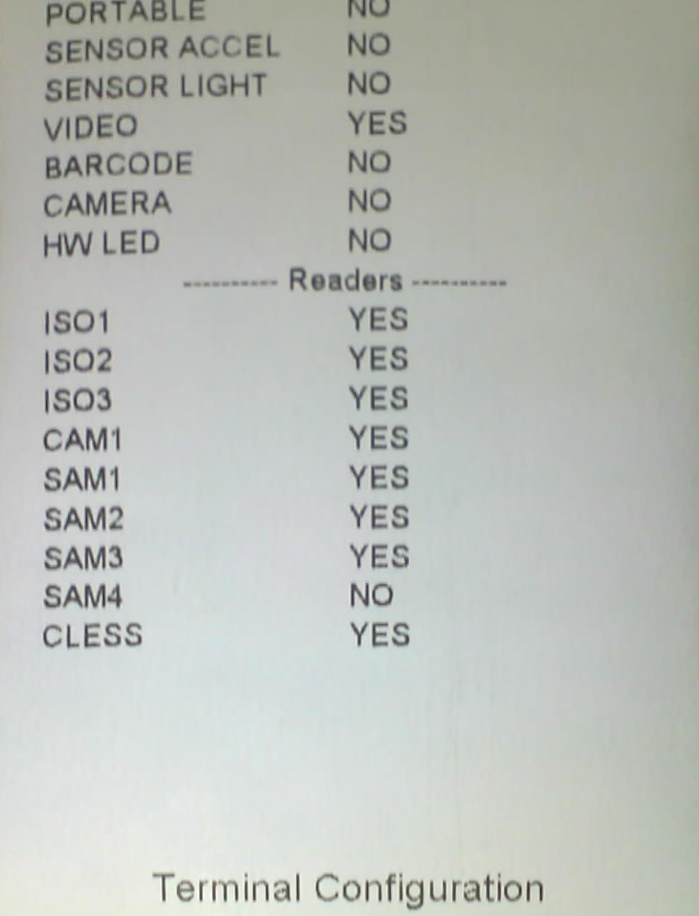
A gauche, une prise de vue réalisée par la caméra du robot, à droite le résultat du traitement de l’image afin de la rendre plus lisible.
=> Analyse sonore dédiée (ex : grésillement / spectre FMT)
=> Mouvements spécifiques (trajectoires)
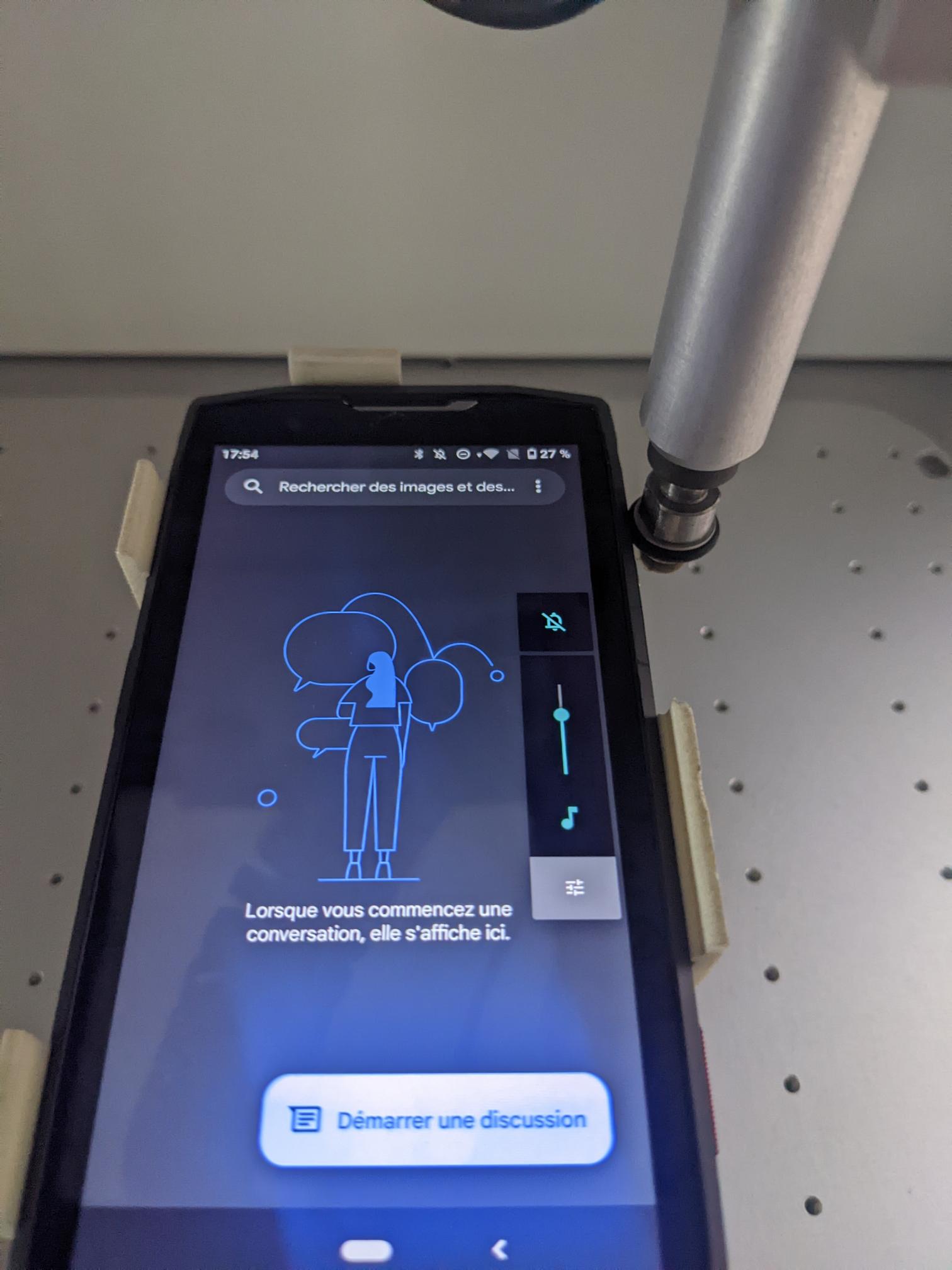
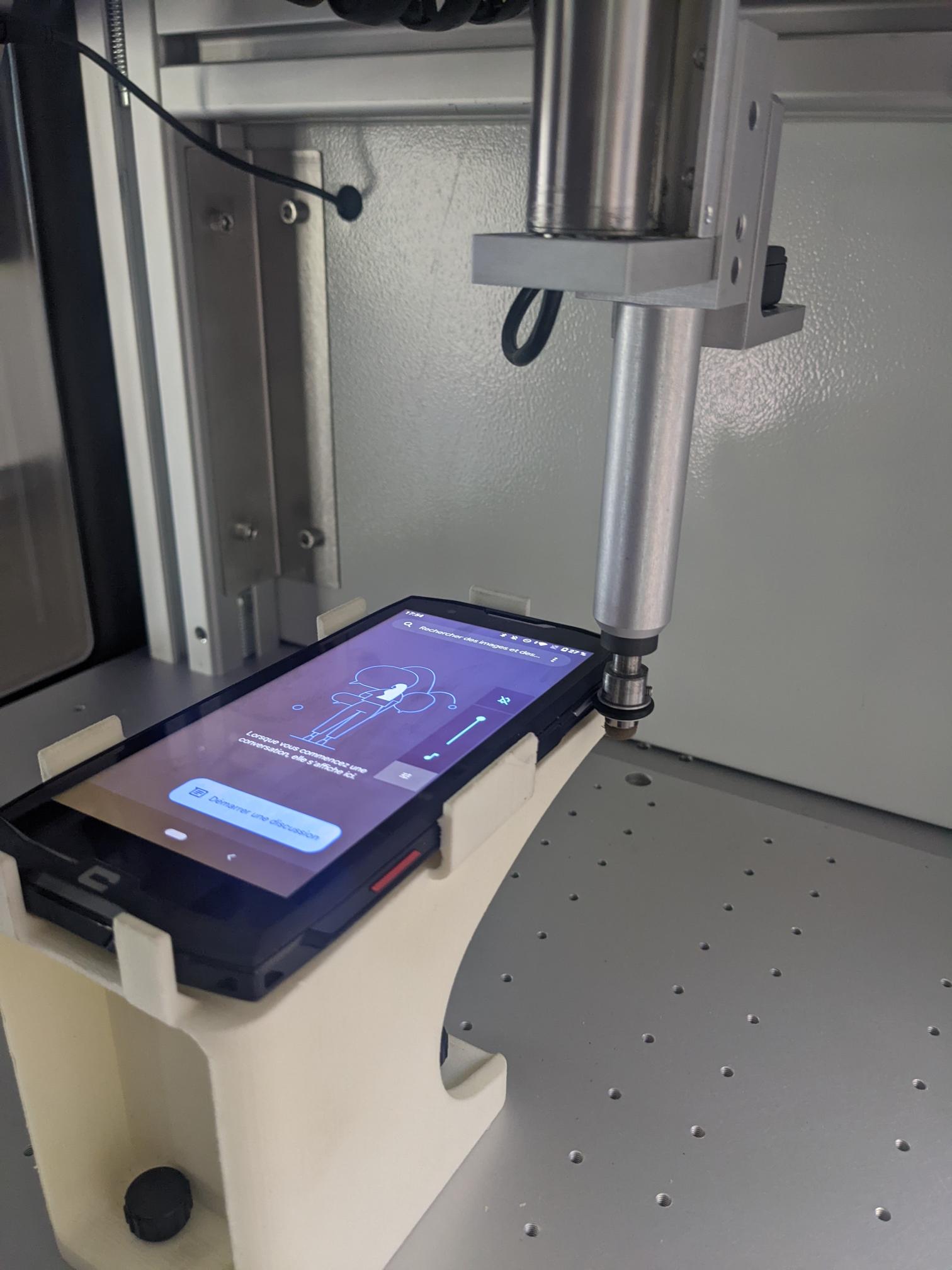
Il s’agit ici d’un appui latéral. Le doigt du robot permet de réaliser des appuis touches notamment sur les boutons latéraux de verrouillage/déverrouillage et de volume du son.
- Permettre l’automatisation des variations de températures (via un protocole ou une sonde électrique) pour tester une centrale de chauffage.
La personnalisation mécanique et électronique
La personnalisation mécanique et électronique consiste à adapter l’équipement du robot eTASQ Motion afin de correspondre aux besoins du client.
Voici des exemples de personnalisation mécanique que nos équipes ont déjà réalisé :
- Dans tous les cas, le support métallique (le posage) du produit à tester est personnalisable

- Pilotage spécifique de la personnalisation mécanique (actionneurs et capteurs)
=> Déplacements d’équipements durant le test (sources lumineuses, écrans, cartes/tickets, smartphones, etc)
- Mécanique pour insérer/retirer des cartes ou des câbles
La pince développée pour INGENICO.
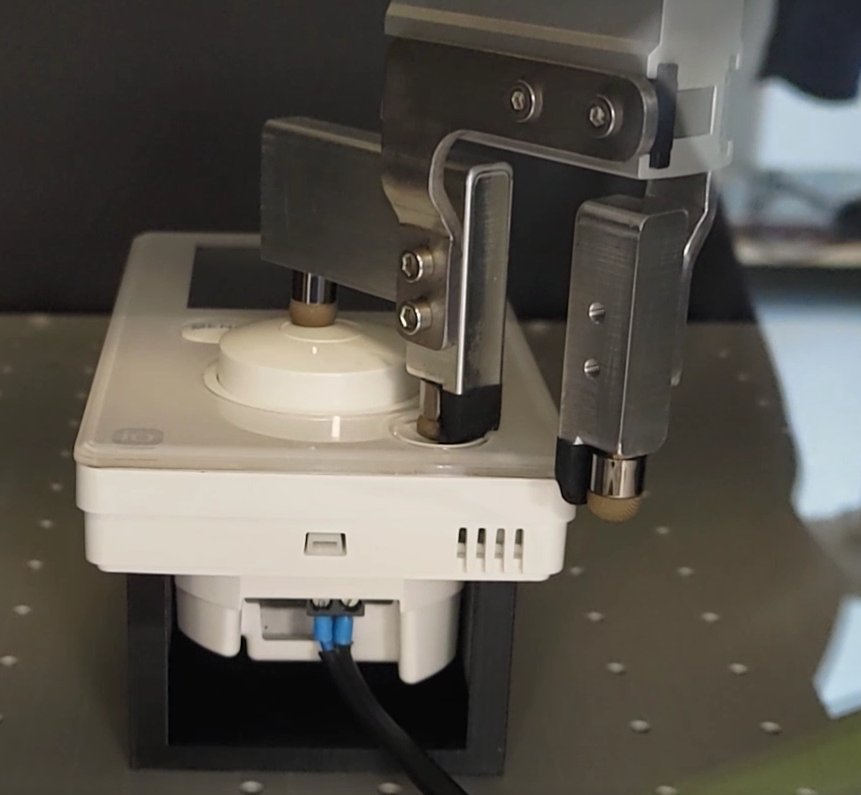
- Mécanique pour actionner des boutons/interrupteurs inaccessibles par le 3 axes du robot.
=> Test de la solution DiCART de Dicartech
Nous avons développé une personnalisation mécanique pour appuyer sur la gâchette du pistolet et un logiciel sur-mesure qui affiche sur le smartphone une vidéo à analyser par le produit.
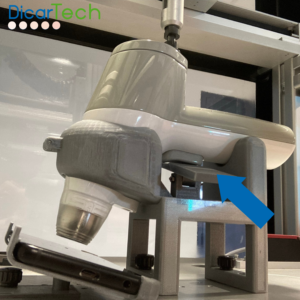
Ici, nous avons créé pour notre client Dicartech, un support mécanique sur-mesure permettant au doigt du robot d’actionner la gâchette de l’appareil situé sous le produit.
Le palpeur vient appuyer sur le support (voir la flèche bleue), et le mouvement de bascule de celui-ci permet de réaliser un appui-touche sur le bouton.
- Pince rotative (adaptation des mors à la forme de votre instrument)
=> Rotation de potentiomètre, rotacteur
=> Double appui
=> Réalisation de la fonction « zoom » sur un smartphone

La pince rotative permet notamment de tourner le bouton du thermostat de chauffage.
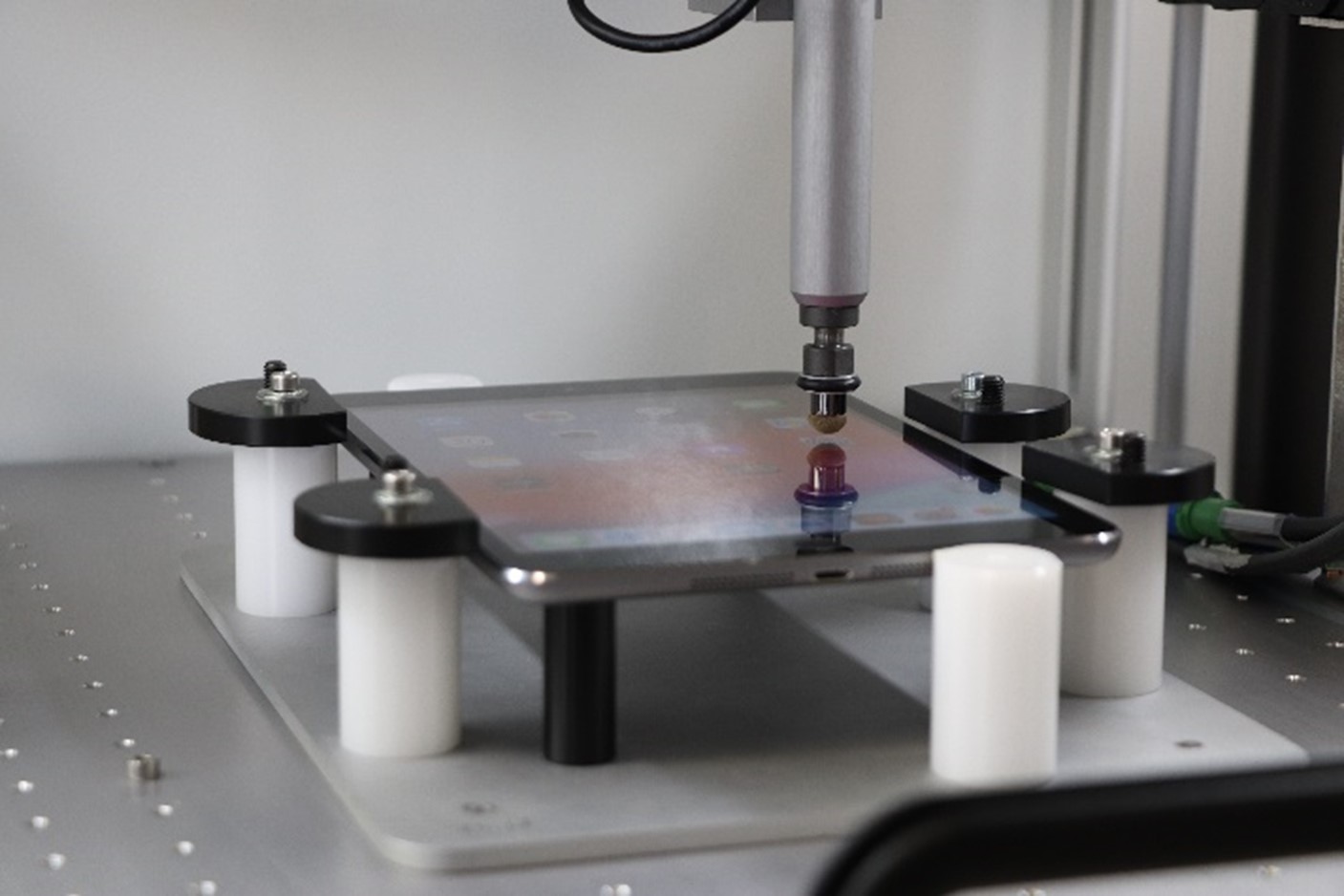
- Gestion des appuis et lectures horizontaux
=> Pour les tests fonctionnels de smartphones
- Multi caméras
=> exemple : pour les TPE INGENICO avec deux écrans
- Gestion d’appuis simultanés
- Gestion de l’alimentation
=> Prises électriques + boîtier batterie
- Gestion d’entrées / sorties
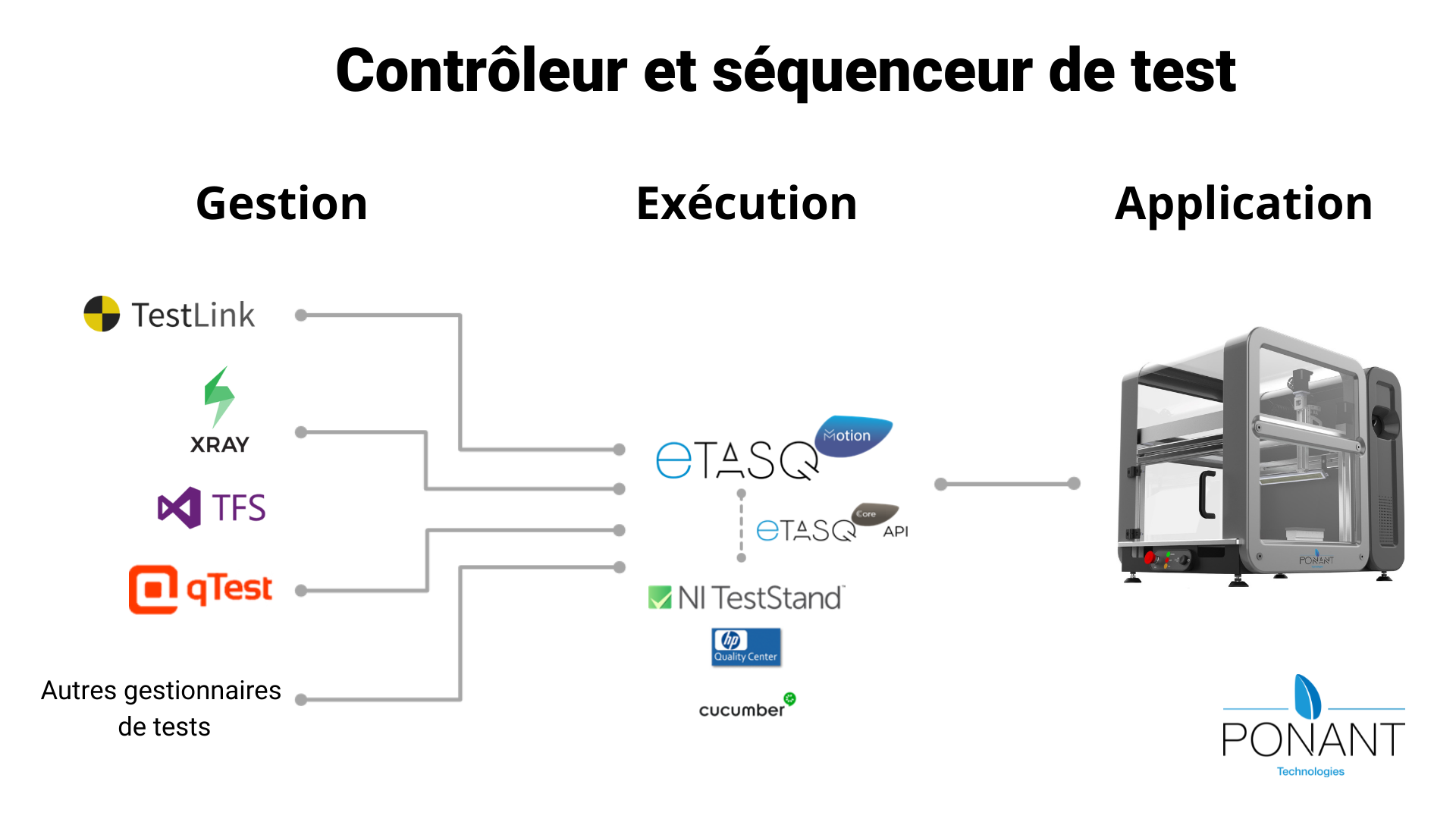
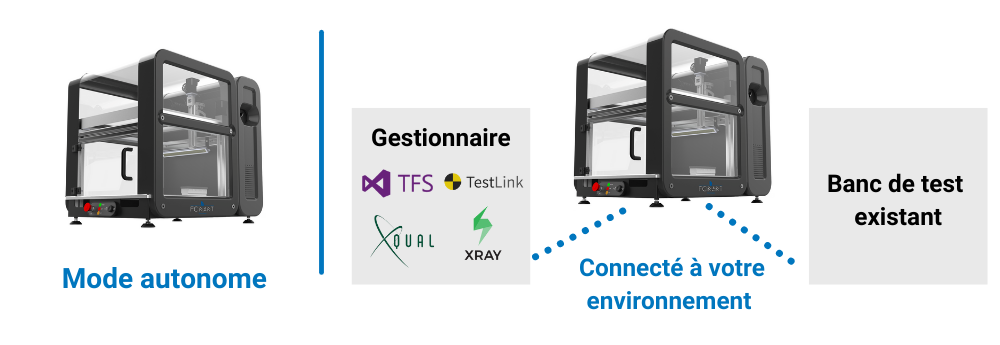
Interfaçage avec votre banc de test et ses instruments
Avec eTASQ Motion vous pouvez interfacer votre banc de test déjà existant ainsi que vos outils de test.
- Banc de test propriétaire ou non qui intègre le robot en tant qu’esclave
=> Pilotage via l’API REST
- Connexion à vos gestionnaires de test (TestLink, TFS, XRAY, XQUAL)
Vous souhaitez des renseignements sur la personnalisation possible pour votre produit ?

